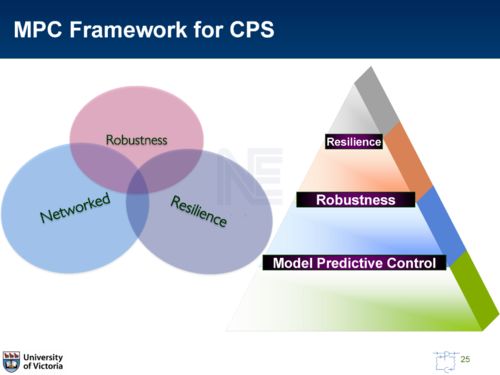
信息物理系統(tǒng)(CPS)的集成魯棒模型預(yù)測控制架構(gòu) 計(jì)算機(jī)信息系統(tǒng)集成的視角
信息物理系統(tǒng)(Cyber-Physical Systems, CPS)是集成了計(jì)算、通信與控制技術(shù),深度融合物理過程與信息過程的復(fù)雜系統(tǒng)。隨著工業(yè)4.0、智能制造和智慧城市等領(lǐng)域的快速發(fā)展,CPS的安全、可靠和高效運(yùn)行至關(guān)重要。在此背景下,將魯棒模型預(yù)測控制(Robust Model Predictive Control, RMPC)架構(gòu)與計(jì)算機(jī)信息系統(tǒng)集成技術(shù)相結(jié)合,為解決CPS面臨的不確定性、資源約束和動(dòng)態(tài)優(yōu)化挑戰(zhàn)提供了強(qiáng)有力的技術(shù)路徑。
一、核心概念:信息物理系統(tǒng)與魯棒模型預(yù)測控制
信息物理系統(tǒng)(CPS)的核心在于“信息”與“物理”的深度閉環(huán)交互。物理世界的過程(如機(jī)械運(yùn)動(dòng)、化學(xué)反應(yīng)、能量流動(dòng))通過傳感器網(wǎng)絡(luò)被實(shí)時(shí)感知并數(shù)字化為信息流;這些信息經(jīng)過計(jì)算系統(tǒng)(如邊緣計(jì)算節(jié)點(diǎn)、云端平臺(tái))的分析、處理和決策后,再通過執(zhí)行器網(wǎng)絡(luò)反饋?zhàn)饔糜谖锢磉^程,形成一個(gè)持續(xù)演化的智能閉環(huán)。
魯棒模型預(yù)測控制(RMPC)是一種先進(jìn)的控制策略。它在傳統(tǒng)模型預(yù)測控制(MPC)——即基于系統(tǒng)動(dòng)態(tài)模型,在線求解有限時(shí)域優(yōu)化問題以獲取最優(yōu)控制序列——的基礎(chǔ)上,引入了對(duì)模型不確定性、外部干擾和測量噪聲的魯棒性處理。RMPC通過優(yōu)化最壞情況下的性能指標(biāo)或采用約束緊縮等技術(shù),確保系統(tǒng)在所有可能的不確定性實(shí)現(xiàn)下,仍能滿足安全性、穩(wěn)定性和性能要求。
二、集成架構(gòu):RMPC與計(jì)算機(jī)信息系統(tǒng)集成的融合
構(gòu)建一個(gè)服務(wù)于CPS的集成RMPC架構(gòu),本質(zhì)上是將控制理論中的高級(jí)算法與計(jì)算機(jī)科學(xué)中的信息系統(tǒng)工程進(jìn)行深度融合。該架構(gòu)通常包含以下幾個(gè)關(guān)鍵層次:
- 物理感知與執(zhí)行層: 由遍布CPS的傳感器(如溫度、壓力、位置傳感器)和執(zhí)行器(如電機(jī)、閥門、機(jī)器人關(guān)節(jié))構(gòu)成。它們通過工業(yè)網(wǎng)絡(luò)(如現(xiàn)場總線、工業(yè)以太網(wǎng)、時(shí)間敏感網(wǎng)絡(luò)TSN)與上層系統(tǒng)連接,負(fù)責(zé)數(shù)據(jù)的采集和指令的執(zhí)行。信息系統(tǒng)集成在此需解決多協(xié)議兼容、實(shí)時(shí)性保障和可靠通信問題。
- 邊緣計(jì)算與控制層: 這是RMPC算法部署的核心。邊緣控制器或工業(yè)PC運(yùn)行RMPC優(yōu)化算法。它接收來自感知層的狀態(tài)信息,結(jié)合系統(tǒng)動(dòng)態(tài)模型(通常考慮不確定性集描述),在線求解一個(gè)(可能是二次規(guī)劃或半定規(guī)劃)優(yōu)化問題,計(jì)算出當(dāng)前時(shí)刻的最優(yōu)控制指令,并下發(fā)至執(zhí)行層。信息系統(tǒng)集成在此體現(xiàn)為算法模塊與實(shí)時(shí)操作系統(tǒng)(RTOS)、通信中間件、數(shù)據(jù)預(yù)處理模塊的無縫集成,確保計(jì)算任務(wù)的確定性和時(shí)效性。
- 云端協(xié)同與優(yōu)化層: 云端平臺(tái)承載著更宏觀和長期的功能。它可能負(fù)責(zé):
- 模型管理與更新: 利用云端的大數(shù)據(jù)和機(jī)器學(xué)習(xí)能力,對(duì)RMPC所使用的系統(tǒng)模型進(jìn)行在線或離線的參數(shù)辨識(shí)、模型修正和不確定性集更新,使模型更貼合實(shí)際物理過程。
- 性能監(jiān)控與參數(shù)整定: 監(jiān)控多個(gè)邊緣控制器的運(yùn)行狀態(tài)和性能指標(biāo),對(duì)RMPC的權(quán)重參數(shù)、約束條件等進(jìn)行遠(yuǎn)程調(diào)優(yōu)。
* 系統(tǒng)級(jí)協(xié)同優(yōu)化: 在包含多個(gè)子系統(tǒng)的大型CPS中(如智能電網(wǎng)、綜合能源系統(tǒng)),云端可協(xié)調(diào)多個(gè)RMPC控制器的目標(biāo),進(jìn)行資源分配和全局優(yōu)化。
這一層是大規(guī)模分布式信息系統(tǒng)集成的典型應(yīng)用,涉及云計(jì)算、微服務(wù)、數(shù)據(jù)湖、API網(wǎng)關(guān)等技術(shù)的集成。
- 信息管理與安全層: 這是貫穿所有層次的支撐體系。它包括:
- 數(shù)據(jù)集成與治理: 對(duì)跨層次、多源異構(gòu)的時(shí)序數(shù)據(jù)、事件數(shù)據(jù)、模型數(shù)據(jù)進(jìn)行統(tǒng)一管理、存儲(chǔ)和分析。
- 安全集成: 集成了從物理訪問控制、網(wǎng)絡(luò)防火墻、入侵檢測到控制算法本身的安全機(jī)制(如安全狀態(tài)估計(jì)、抗攻擊RMPC),形成縱深防御體系,抵御網(wǎng)絡(luò)攻擊對(duì)控制系統(tǒng)的威脅。
- 人機(jī)交互(HMI)與決策支持系統(tǒng)(DSS): 為運(yùn)營人員提供可視化界面,展示系統(tǒng)狀態(tài)、控制性能、報(bào)警信息,并輔助高級(jí)決策。
三、集成的關(guān)鍵挑戰(zhàn)與技術(shù)路徑
- 實(shí)時(shí)性與計(jì)算復(fù)雜性的平衡: RMPC的在線優(yōu)化問題計(jì)算量較大。集成架構(gòu)需要在算法設(shè)計(jì)(如采用顯式MPC、分布式優(yōu)化分解)、硬件選型(高性能工業(yè)計(jì)算單元、FPGA加速)和軟件優(yōu)化(高效求解器、代碼生成)上協(xié)同,滿足嚴(yán)格的采樣周期要求。
- 網(wǎng)絡(luò)化帶來的不確定性: 在分布式架構(gòu)中,網(wǎng)絡(luò)通信可能引入時(shí)延、丟包和數(shù)據(jù)異步。這需要將網(wǎng)絡(luò)控制系統(tǒng)(NCS) 的理論與RMPC結(jié)合,設(shè)計(jì)能容忍通信非理想特性的魯棒預(yù)測控制器,或采用事件觸發(fā)等機(jī)制減少不必要的通信。
- 信息系統(tǒng)的互操作性與標(biāo)準(zhǔn)化: 實(shí)現(xiàn)從現(xiàn)場設(shè)備到云端應(yīng)用的縱向集成,以及不同廠商子系統(tǒng)間的橫向集成,依賴于統(tǒng)一的數(shù)據(jù)模型和通信標(biāo)準(zhǔn)(如OPC UA、DDS、AAS),這是計(jì)算機(jī)信息系統(tǒng)集成的核心課題。
- 安全與功能安全的融合: CPS的集成架構(gòu)必須同時(shí)考慮信息安全(Cybersecurity)和功能安全(Functional Safety)。RMPC的設(shè)計(jì)需要考慮安全約束,而信息系統(tǒng)的安全防護(hù)機(jī)制(如加密通信、身份認(rèn)證)不能破壞控制回路的實(shí)時(shí)性和確定性。兩者需在架構(gòu)設(shè)計(jì)初期就進(jìn)行協(xié)同(Security-by-Design & Safety-by-Design)。
四、應(yīng)用前景與結(jié)論
集成魯棒模型預(yù)測控制架構(gòu)的CPS,在高端制造(如半導(dǎo)體生產(chǎn)線)、智能電網(wǎng)(新能源消納與頻率穩(wěn)定)、自動(dòng)駕駛車隊(duì)協(xié)同、智慧能源管理等領(lǐng)域具有廣闊的應(yīng)用前景。它代表了控制工程與計(jì)算機(jī)信息系統(tǒng)集成技術(shù)前沿交叉的成果。
面向信息物理系統(tǒng)的集成魯棒模型預(yù)測控制架構(gòu),并非簡單的算法疊加或系統(tǒng)拼裝,而是通過深度集成,將魯棒控制的理論優(yōu)勢與計(jì)算機(jī)信息系統(tǒng)的可擴(kuò)展性、互聯(lián)互通和智能分析能力有機(jī)結(jié)合,從而構(gòu)建出更具適應(yīng)性、韌性和智能性的新一代工業(yè)系統(tǒng)核心控制方案。其成功實(shí)施,依賴于控制理論、計(jì)算機(jī)科學(xué)、通信技術(shù)和行業(yè)知識(shí)的跨學(xué)科協(xié)同創(chuàng)新。
如若轉(zhuǎn)載,請(qǐng)注明出處:http://www.s3576.cn/product/83.html
更新時(shí)間:2026-04-14 22:43:33